Die Z-Achse ist die senkrechte Hebe- oder Senkkonstruktion.
Entweder wird der Drucktisch abgesenkt, oder das Werkzeug angehoben, je nach dem welche Konstruktion man anwendet.
Bei meinem Drucker wird das Werkzeug zusammen mit dem Schlitten für den Druckkopf hochgekurbelt.
Die Konstruktion des Prusa I3 mit den beiden Motoren und den zwei Gewindestäben hat leider ein paar Nachteile, weshalb ich hier auf eine eigene Konstruktion setze und vom bekannten Entwurf abweiche.
Das sind vor allem zwei Erwägungen:
Zum Umrüsten auf ein Bohrgerät ist es der einfachen Bedienbarkeit halber sehr von Vorteil, den Nullpunkt in der Höhe, also das auftreffen des Bohrers auf dem Werkstück, einfach per Hand manuell einstellen zu können. So kann man einfach immer mit konstanter Bohrtiefe arbeiten und muss nicht jedes mal einen Offset ermitteln und eingeben. Durch die zwei separat mit Schrittmotoren angetriebenen Spindeln ist Handverstellung unmöglich, da ja beide kurbeln exakt synchron gedreht werden müssten damit sich die Konstruktion nicht verkantet.
Der zweite Punkt hängt mit den überlicherweise verwendeten Motortreibern zusammen: Durch die zwei Motore an einem Treiber muss man einen hohen Strom am Motortreiber einstellen. Der sorgt dafür, das der Treiber leicht sehr heiß werden kann und sich dann eventuell kurzzeitig abschaltet, was zu Aussetzern im Betrieb der motorischen Höhenverstellung führen kann.
Bei dem Prusa I3 Entwurf steht zudem das Eigengewicht der Z-Achse (beim 3D Druck wirken zwar kaum dynamische Kräfte an der Stelle) auf den Motorlagern der Schrittmotore.
Da ich nur einen einsetzen möchte (aus weiter oben genannten Gründen) hängt eine Gewindespindel mangels Schrittmotor in der Luft.
Außerdem liegt das statische Gewicht der Konstruktion auf der flexiblen Wellenkupplung und drückt diese zusammen, was nicht im Sinne der Erfindung ist.
Da ich die andere Seite mangels Schrittmotor sowiso mit Lagern abfangen muss, werd ich das wohl gleich auf beiden Seiten umsetzen.
Ein normales 625 Axialrillenkugellager wird für die etwa 200 Gramm Gewicht ausreichend sein.
Zum Einstellen des Nullpunks werde ich dann oben auf die Z-Achse mit dem Schrittmotor eine kleine Kurbel anbringen, und die andere Seite mit einem Koppeltrieb mitantreiben.
Deshalb müssen die Gewindestäbe oben ebenfalls (wegen der Querkräfte des Koppeltriebs) mit Kugellagern abgefangen werden.
Dafür habe ich neue Z-Achsenhalter mit Kugellageraufnahme konstruiert und gedruckt. Zum Einrichten der Parallelität der beiden Seiten der Führung sind horizonale Langlöcher in den Halterungen vorgesehen.
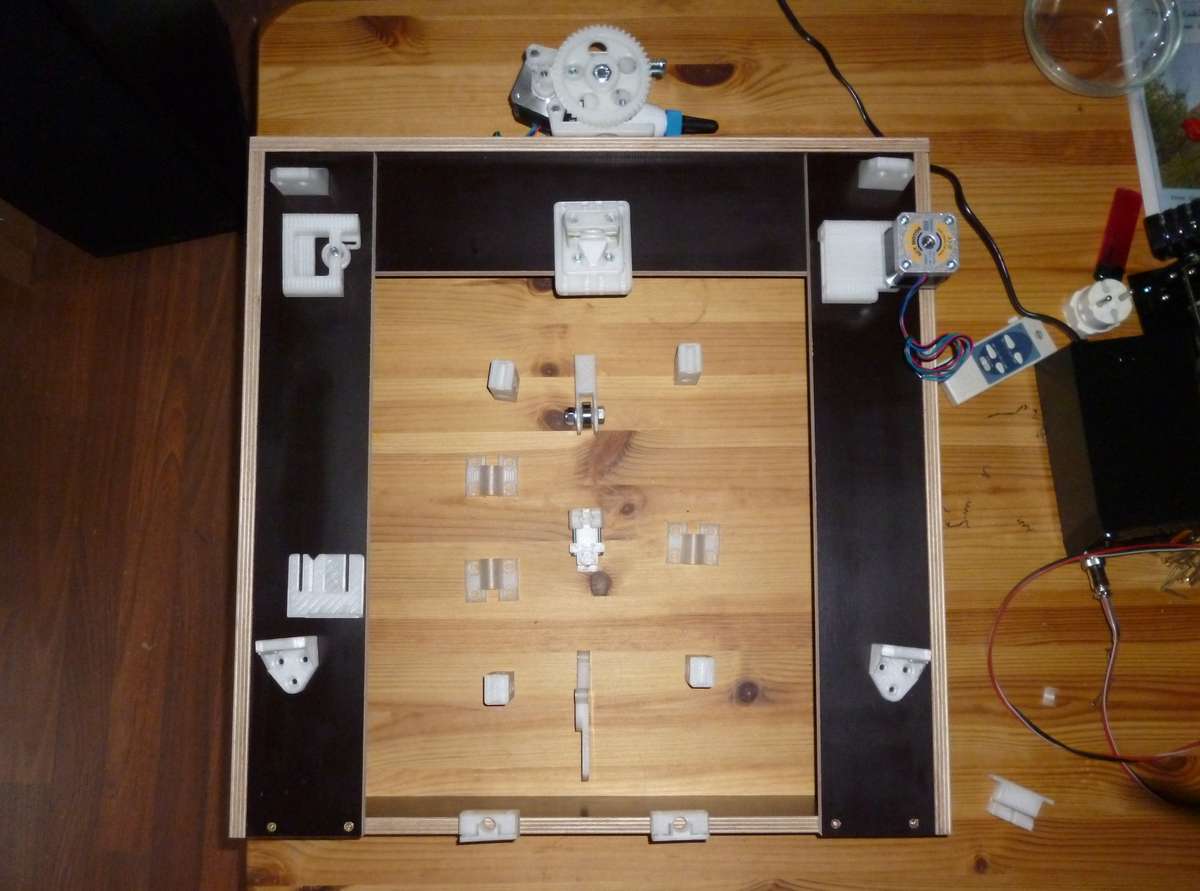
Oben sind bereits die Wellenhalter für die waagerechte X-Achse zu sehen, sowie oben der X-Schlitten mit dem Hot-End-Halter.
Ich greife hier schon mal vor: Ich hab die Halter dann nochmal geändert und dickere Stahlwellen mit 12mm durchmesser eingebaut, da diese ja die dynamischen Kräfte der bewegten Masse aus der X-Achse abführen müssen und ich schneller drucken möchte als bisher.